Career Objectives and Research Interests
I aim to leverage my extensive background in software development, artificial intelligence, and robotics to drive innovation in the tech industry.
My primary career objective is to develop advanced solutions that optimize business processes, enhance automation, and improve user experiences,
particularly in the areas of data analysis, AI-driven applications, and enterprise resource planning (ERP) systems.
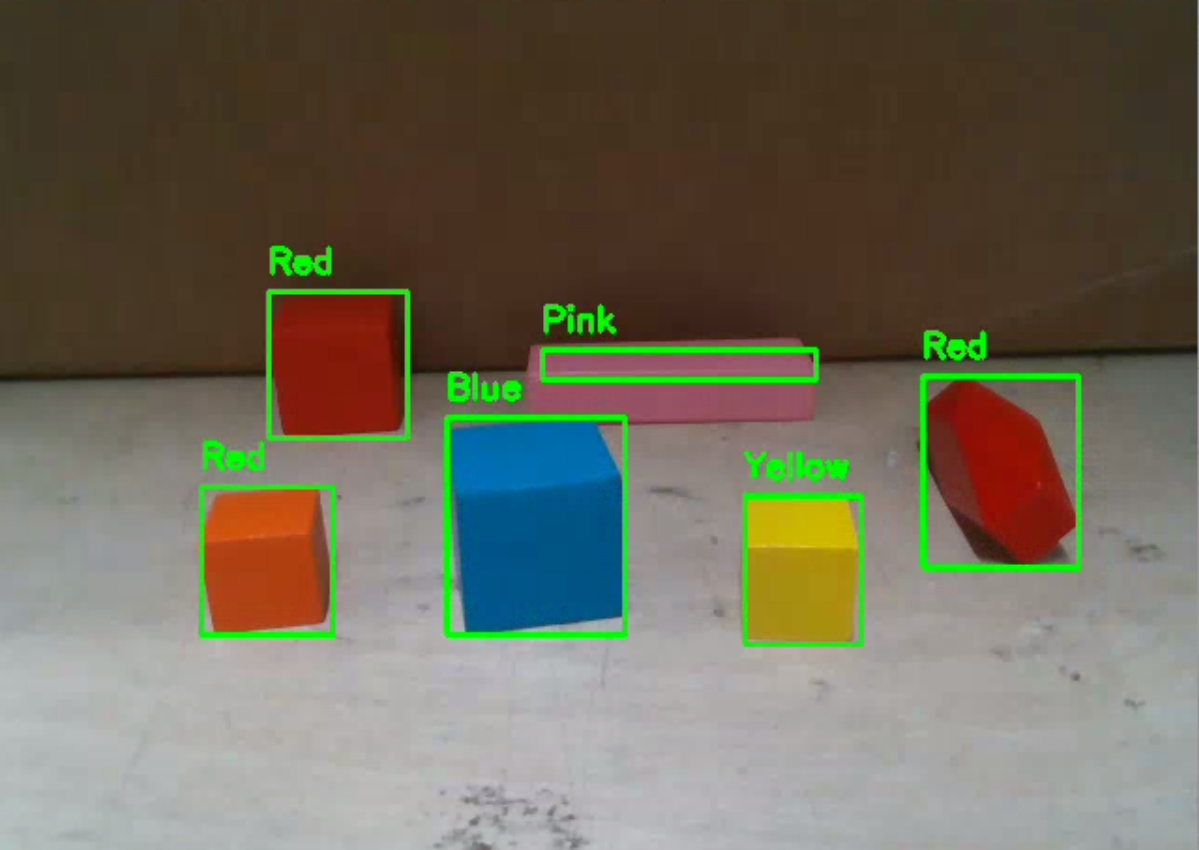
I am particularly interested in the intersection of artificial intelligence and automation within real-world applications, such as speech recognition
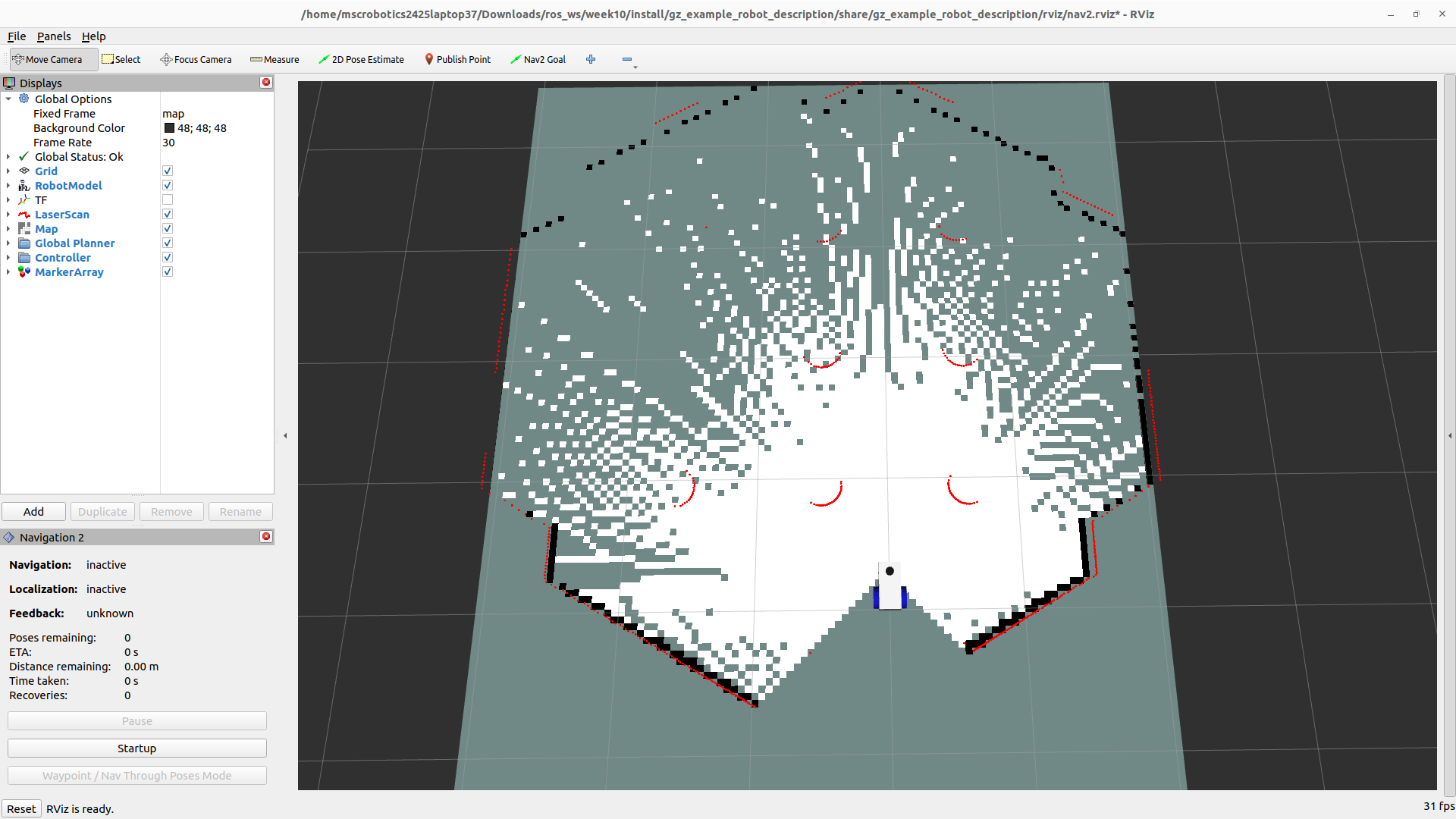
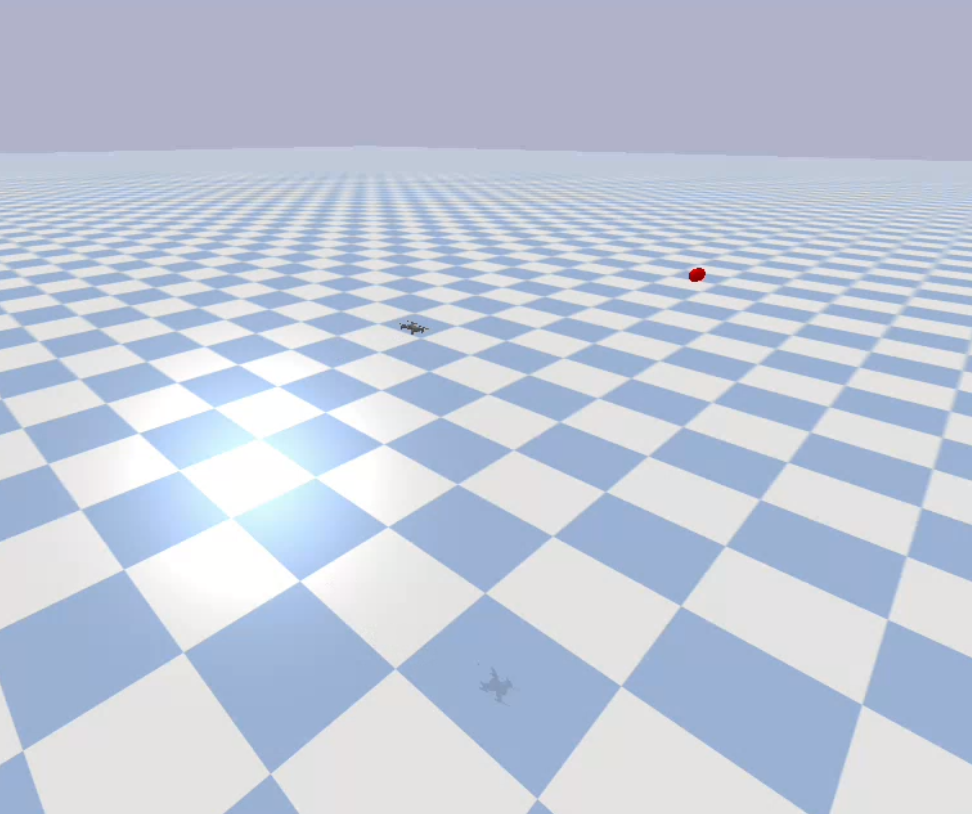
and robotics, and how they can be integrated into business operations through platforms like Dynamics 365. My research interests also focus on deep
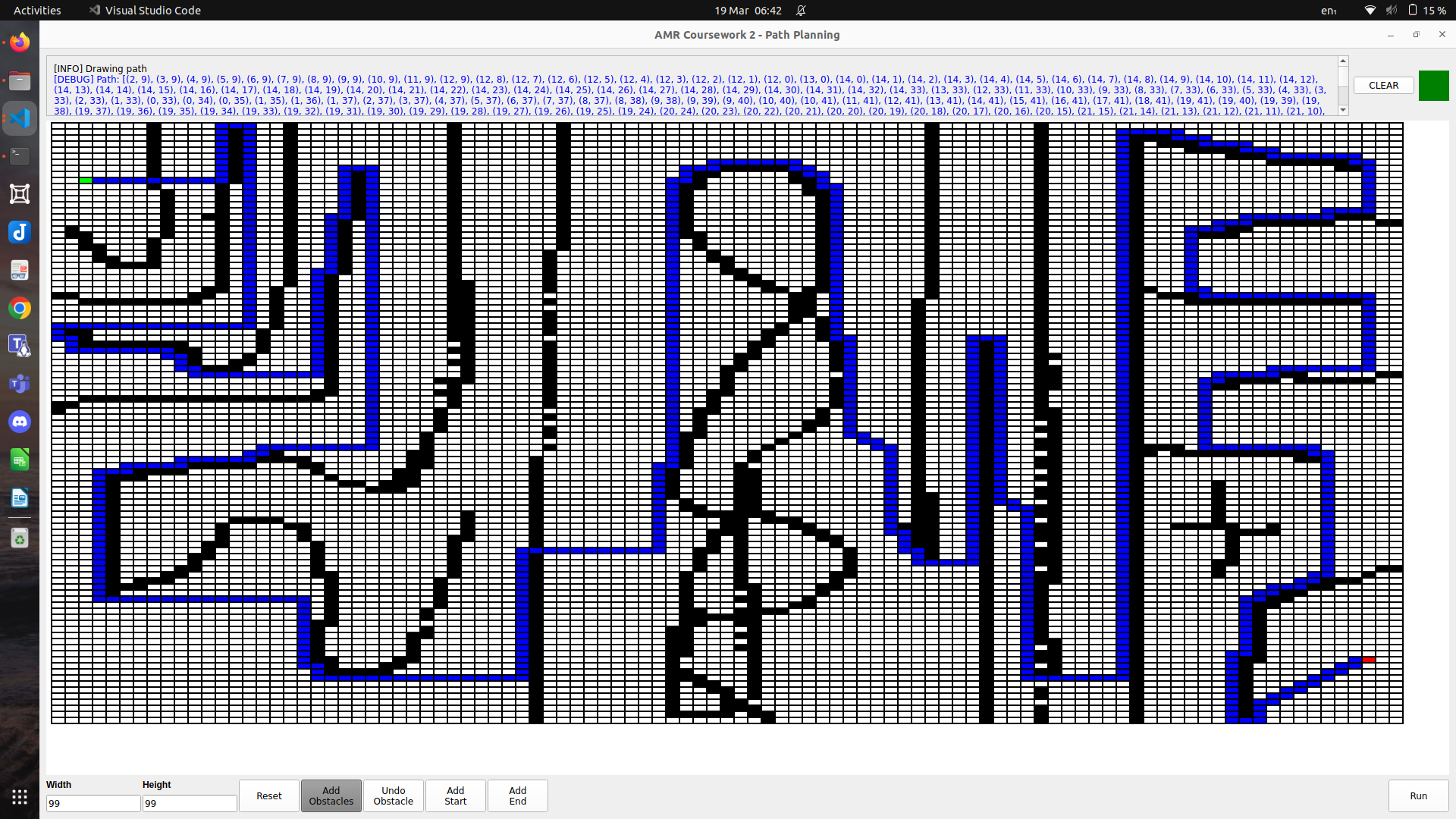
learning, human-robot interaction, and the development of smart systems that can automate complex tasks. I am passionate about continuing to explore
how AI and robotics can be used to solve critical challenges in industries such as finance, healthcare, and education.
I seek opportunities where I can contribute to impactful projects, collaborate with cross-functional teams, and continue advancing my skills in areas
such as AI, robotics, and ERP systems to help create cutting-edge technological solutions. This is my passion, and I strive to reach it whether through
industry or academia and research.